VOLVO Truck Адаптивная система автоматического
поддержания скорости (АСС) Блок управления, адаптивная система автоматического поддержания скорости,
TYPE-FH, L2H1 / L2H2 / L2H3
Устройство и принцип действия
Адаптивная система автоматического поддержания скорости
Принцип действия
Адаптивная система автоматического поддержания скорости является системой обеспечения комфортности, расширяющей возможности стандартной системы автоматического поддержания скорости Она автоматически снижает скорость автомобиля при появлении впереди на той же полосе движения автомобиля, двигающегося с более низкой скоростью. Скорость снижается путем понижения крутящего момента двигателя и при помощи моторного тормоза/ретардера. Когда пространство впереди освобождается от медленно движущегося автомобиля, автомобиль вновь набирает ту же скорость, что была установлена на системе автоматического поддержания скорости в начале.
Сигнализация сближения извещает водителя о создании опасной ситуации, т.е. ситуации, когда тскорость сближения с движущимся впереди
автомобилем слишком высока.
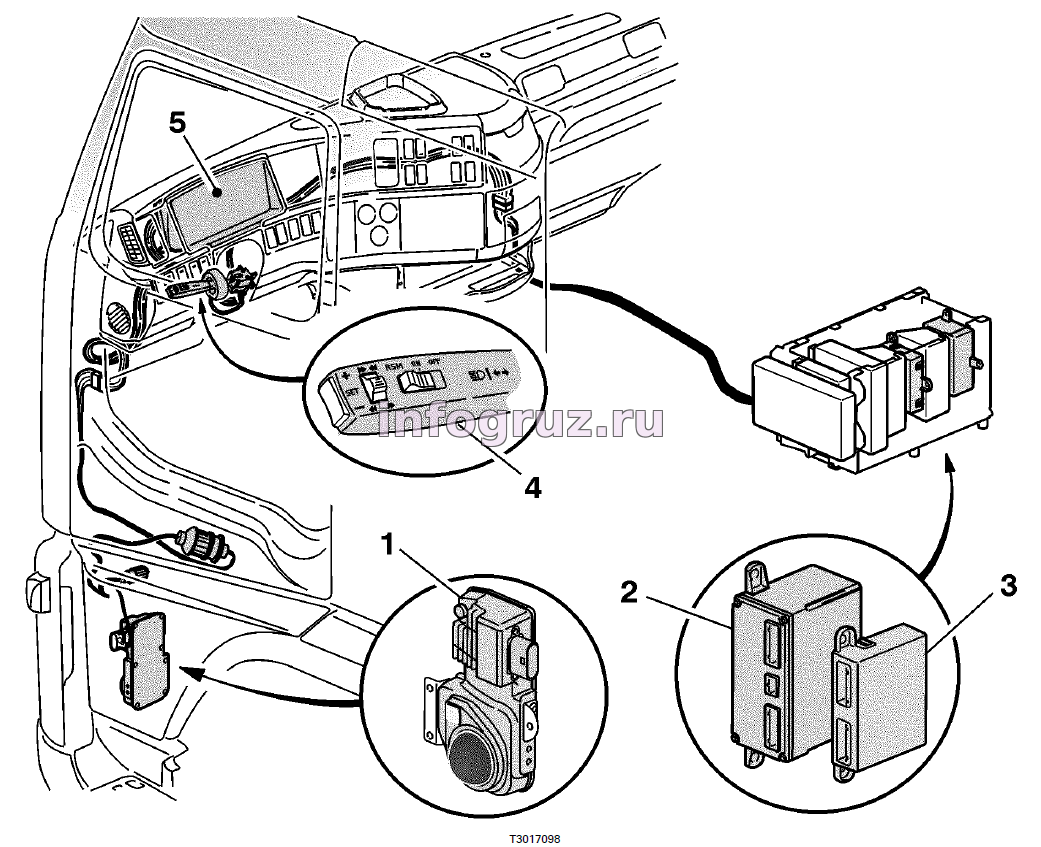
Расположение компонентов
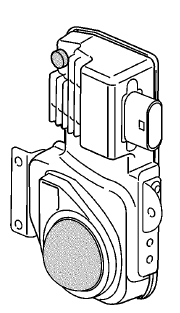
1 Радар системы АСС, компонент B120
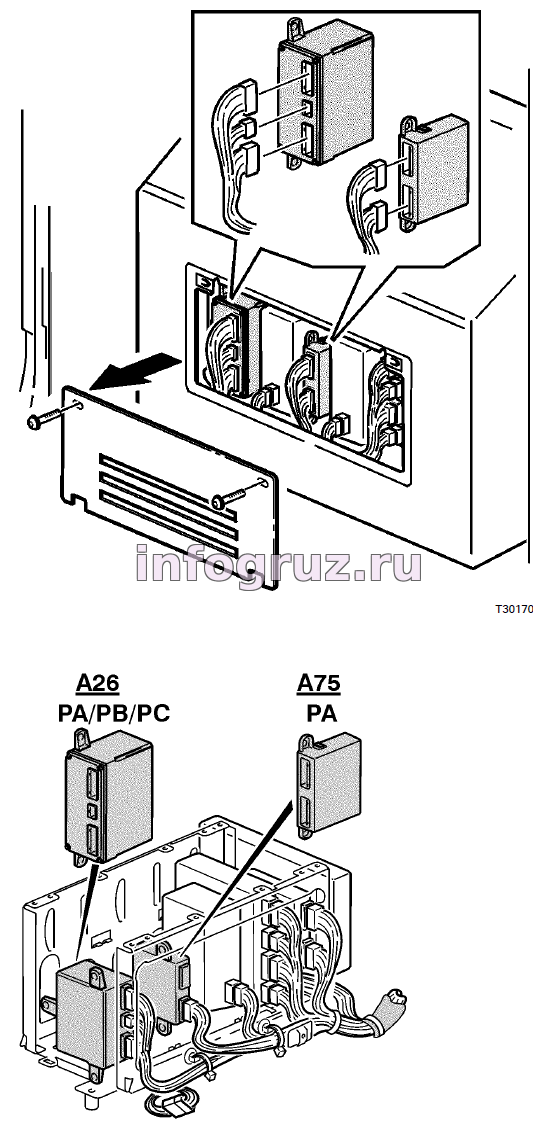
2 Блок управления системы АСС, компонент A26
3 Курсовой датчик и блок электропитания,компонент A75
4 Выключатель, система автоматического поддержания скорости, компонент S25
5 Прибор на панели управления, компонент A03
Конструкция
Радиолокационный датчик с рабочей частотой 77 Гц располагается на передней части автомобиля,между радиатором и передней фарой за нижней
частью решетки радиатора. Он монтируется на регулируемой пластине, которая позволяет настраивать датчик механическим способом в ходе
сборки автомобиля или после его ремонта. Все остальные настройки производятся при помощи программного обеспечения в ходе обычной
эксплуатации. В систему в ходе сборки вводится предустановленная программа.
Радарный блок (B120) соединен с блоком управления системы АСС (A26) через собственный канал сети CAN (CAN 6).
Блок управления регулирует процесс обмена данными между каналами сети CAN J1939 и J1587.
Блок курсового датчика и электропитания системы ACC (A75) состоит из курсового датчика и блока питания 12 В и подсоединен как к блоку управления,
так и к радару.
Система АСС оснащена новым переключателем для системы автоматического поддержания скорости,новыми светодиодами и новым индикатором на
панели приборов.
Калибровка
Калибровка производится для настройки излучения радара прямо вперед. Существуют 2 метода калибровки радара.
Метод 1
Измерение производится при движении на расстоянии не менее 80 м за другим автомобилем по прямой дороге с использованием программы
VCADS Pro для определения погрешности измерения. Полученная величина затем используется для калибровки радара. Автомобиль,находящийся впереди, во время проведения измерения должен двигаться абсолютно прямо перед автомобилем, на котором проводится калибровка.
Метод 2
Автомобиль, на котором проводится калибровка, неподвижен. Измерение производится при движении автомобиля, расстояние до которого измеряется, по прямой линии, удаляясь от автомобиля, на котором производится калибровка, на расстояние не менее 80 м. Погрешность измерения определяется при помощи VCADS Pro.
Полученная величина затем используется для калибровки радара. Автомобиль, находящийся впереди, во время проведения измерения должен
двигаться абсолютно прямо перед автомобилем, на котором проводится калибровка.
|